| Problem statement Solution video |
DISCUSSION THREAD
Discussion
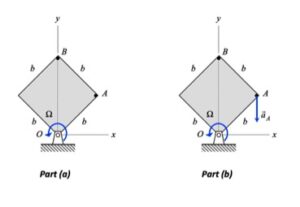
Note that the plate rotates about point O. Therefore, O is the center of the circular paths of points A and B. From the animation above, we see that the velocities of A and B are tangent to their circular paths, as expected. The accelerations of A and B are NOT perpendicular to the paths of A and B since the speeds of A and B are increasing in time (and consequently, A and B each have positive tangential components of acceleration).
Initially, the acceleration for these two points is nearly aligned with velocity, since the speeds are small and therefore the centripetal components of acceleration are small. Near the end of the first revolution of the plate, the speeds have increased to the point where the centripetal components of acceleration dominate, and acceleration is nearly perpendicular to the path.
Solution hints
For Part a) of this problem, it is recommended that you use the rigid body kinematics equations using point O as the reference point, since the velocity and acceleration of O are zero. That is, you should use v_B = v_O + Ω x r_B/O and a_B = a_O + Ω_dot x r_B/O - Ω^2*r_B/O. Repeat the process for finding the velocity and acceleration of A.
For Part b) of this problem, it is recommended that you use the rigid body kinematics equations with point A first. This will give you the equations needed to find Ω_dot. Then, use the rigid body kinematics equations to find the acceleration of B.
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
For Part B, would we split the a_A equation into purely the i direction and set the equation to 0 to solve for the answer?
That's how I did it. Once I did the cross products and had my i and j we know from the given information that the acceleration in a is negative in the y direction so 0 in the i. Take your i component and set it equal to zero and once you plug in your given values (radius and 5 rad/sec) you'll get what Ω_dot is.
Whenever you are solving for the angular acceleration in part B, do you keep the alpha variable attached to k_hat, or do you just treat the angular acceleration as a non-vector variable?
Angular acceleration ends up being part of the j_hat term of the acceleration of A, so you would separate the variables based on the i_hat and j_hat components in order to solve for the angular acceleration. It only says to solve for the value of omega_dot, so I would assume you don't need to put the k_hat term.
William:
Absolutely. You A:WAYS need to write down the angular acceleration of the rigid body as a vector - otherwise, you will not be able to calculate the alpha x r vector correctly. Don't take any shortcuts in your work.
I don't know if this is the right place to put this, but assignment 6 accidentally grade both questions, so it is out of 20 points. I think it is just supposed to be out of ten. Plus it is taking off ten points for the other question.
This should be fixed in gradescope. Please check and let me know if this is not the case.