| Problem statement Solution video |
DISCUSSION THREAD
Any questions?? Please ask/answer questions regarding this homework problem through the "Leave a Comment" link above.
Discussion
FOUR-STEP PLAN
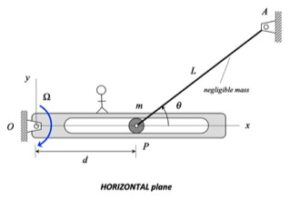
Step 1: FBD - Draw a free body diagram of particle P. Note that the slot is smooth (no friction), and that the system moves in a horizontal plane (no influence of gravity).
Step 2: Newton - Recommended that you use a set of xy-coordinate axes attached to slotted arm. Resolve your forces into xy-components, and write down Newton's 2nd law for P in terms of its xy-components.
Step 3: Kinematics - It is recommended that you use the moving reference frame velocity and acceleration equations for point P, with the observer being attached to the slotted arm:
vP = vO + (vP/O)rel + ω x rP/O
aP = aO + (aP/O)rel + α x rP/O + 2ω x (vP/O)rel + ω x (ω x rP/O)
Along with the rigid body velocity and acceleration equations for link AP, you will be able to solve these equations for the xy-components of the acceleration of P.
Step 4: Solve - Combine your equations from Steps 2 and 3 to solve for the normal force acting on P by the slot and the force on P by link AP.
How do you find (v_P/O)_rel? I have everything I need for v except (v_P/O)_rel, for which I got (v_P/O)_rel = d_dot*i (with i being in the direction of the slotted rod). But d_dot is unknown.
My first thought was to write another equation for v_P and use point A as the reference point, but that ends up introducing another unknown variable (theta_dot).
You can solve for that theta dot value then solve for d dot.
Wouldn't that give more unknowns though? I set the equation up as v_P = V_O + (v_P/O)_rel + omega x r_P/O and v_P = V_A + (v_P/A)_rel + theta_dot x r_P/A and simplified it to (v_P/O)_rel + omega x r_P/O = theta_dot x r_P/A. Doesn't that still leave two unknowns ((v_P/O)_rel and theta_dot)? Or is there a different way to solve for it?
Using these equations does involve having two unknowns. However, you can solve for theta_dot by setting the j components from the two velocity equations equal to each other. Then you can solve for the d_dot by setting the i components equal to each other. I believe you will have to do a similar process for the acceleration as well.
I think you can do this because the values have components in different directions (I and j) and thus you actually get more equations here and the same number of unknowns.
Does it matter which directions we initially make the force vectors face on the free body diagram for P?
Would VP/A rel be 0 in this problem since it's set on a rigid member with no sliders?
Yes
Since the plane is horizontal we don't include gravity in our calculations correct?
Yes, that is correct.