| Problem statement Solution video |
DISCUSSION THREAD
Ask and answer questions here. You learn from both.
DISCUSSION and HINTS
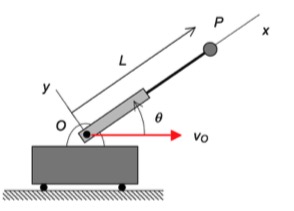
As can be seen from the animation below, the path taken by P is a bit complex. However, what if we put an observer on the non-extending section of the rotating arm - what motion would the observer see for P? Think about that.
Suppose that we do put an observer on the non-extending portion of the rotating arm. That observer would describe the motion of P as being on a straight path aligned with the x-axis. Specifically, we have:
(vP/O)rel = L_dot i
(aP/O)rel = L_ddot i
Using this observer, we can write down the velocity and acceleration of P using the moving reference frame velocity and acceleration equations:
vP = vO + (vP/O)rel + ω x rP/O
aP = aO + (aP/O)rel + α x rP/O + 2ω x (vP/O)rel + ω x (ω x rP/O)
where ω and α are the angular velocity and angular acceleration, respectively, of the observer.
If the observer were to be on the portion of the arm that extends, would we be able to solve this problem without needing vectors that are relative to P/O ?
There would not be anything incorrect in choosing the observer on the portion of the arm that extends; however, such a choice of an observer would not be helpful in solving the problem.
Your best choice is to put the observer on the non-extending section of the arm. With that choice, the velocity and acceleration of P as seen by the observer are in the x-direction. This simplifies the solution process.
Do we have to convert to the global coordinate system? I'm a bit confused on when we're supposed to do this
Unless specified otherwise, you are free to write your final answer in terms of either a set of fixed coordinates or a set of moving coordinates. Your choice.
Yes, we'll have to convert between I and i using sin and cos relations.
Is it fair to assume that theta_dot is the angular velocity of the observer, considering that no matter where it is placed on the arm they will have the same angular velocity?
Yes I believe so
Yes. The angular velocity of the observer is the angular velocity of the observer's axes, whose angle is changing at a rate of theta dot since they are tied to the arm OP.
Yes; angular velocity is an intensive property meaning that it does not depend on size of the body or distance from origin.
Could we also solve this using relative polar coordinates? Find the polar velocity and acceleration of P relative to O, then convert to cartesian and add it to the absolute velocity of the cart?
You could; however, we would like for you to learn how to use moving reference frames. Getting a good start with the MRF approach will take you much further over the next four days of class as we work with more complex mechanisms and with systems in three dimensions.
In this case, because it is stated that theta is equal to 90 degrees, should we just say that Vo is in the negative j direction? Also, because w = theta dot is constant, can we say that alpha is zero?
When solving for the angular velocity of OP, I assumed we are to use the equation where omega = -v_naught / r. In this case, is r equal to L? That seems to be the logical conclusion but I am not totally sure.
After reading comments, I have determined omega is just theta_dot in the z direction, but why does the former equation not apply here, the answers are different?
Your equation of omega = -v_naught / r is based on the distance "r" for point P being measured from the instant center of the body.
By you using r = L, I think that you are implying that O is the IC of the rotating arm. Note that O can NOT be the IC since O has a non-zero velocity (IC's are centers of rotation, points that at the instant of interest what have zero velocity).
As you state below, the omega for your observer is simply theta_dot*k_hat.
I'm having some trouble with the velocity equations. After getting an equation for V_p with a fixed CS and an equation with a rotating CS, I set them equal to each other and convert coordinate systems.
I get an equation for i that makes sense, but for j I either get 0 = 0 (if I assume V_o to be non-zero in the rotating CS case), or V_o = 0 (if I assume V_o to be zero in the rotating CS case, since from the perspective of the observer, V_o is not moving). Both situations make sense to me, but I'm not entirely sure which is correct for the rotating case.
It is also just now occurring to me that everything is known to find V_p so I think I can just solve for that, but I would still like to know which analysis is correct from previous question.
For me, I imagined the observer to be located on top of the moving cart but oriented with the extended arm (in the x-y coordinate system). Because this is one body, you can simplify your analysis by only taking into account the rotating coordinate system (no fixed coordinate system analysis is necessary for this problem). Using this equation, everything is given to us. V_o is non-zero in the global X-Y coordinate system. Thus, taking into account all the individual parts of the equation, you only need to convert between the global X-Y coordinate system and the local x-y coordinate system to solve this problem. I hope this makes sense.
Be careful. By choosing the observer to be riding along on only the cart, your observer has a zero angular velocity and zero angular acceleration. There is nothing wrong with this choice; however, with that choice you are not taking full advantage of what the moving reference frame approach can provide in simplifying the analysis.
For this question we have to make sure that I and J components of the speed of the cart be changed to little i and j since the little i and j are angled while the I, J are not. Also, since the angle of the arm is moving at a constant rate, the angular acceleration of the arm will be equal to 0.