| Problem statement Solution video https://youtu.be/rkIKCA_7Oic |
DISCUSSION THREAD

Ask your questions here. Or, answer questions of others here. Either way, you can learn.
DISCUSSION and HINTS
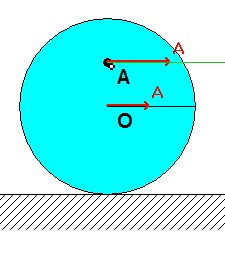
A cable connects block B to point A on the interior of the disk. We want to know the angular acceleration of the disk on release from rest. Watch the animation of the motion of the disk. What do you see in terms of the relationship between the accelerations of points O and A at the instant of release? And, between the accelerations of points A and B?
Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
Draw individual free body diagrams (FBDs) of the disk and block.
Step 2: Kinetics (Newton/Euler)
Note that the no-slip contact point C will have, at most, an acceleration that points toward O. Because of this, we can use the following Euler equation for the disk: ΣMC = ICαdisk.
Step 3: Kinematics
Since the Newton equation for the block requires us to relate the acceleration of block B to the angular acceleration of the disk through point A on the disk, we should use the following rigid body kinematics equation:
aA= aC + αdisk x rA/C - ωdisk2rA/C
where we know that the horizontal component of acceleration of the no-slip contact point C is zero.
Step 4: Solve
From your equations in Steps 2 and 3, solve for the angular acceleration of the disk.