| Problem statement Solution video |
DISCUSSION THREAD
Ask and answer questions here. Think about helping out someone who has a question. You will learn as you help with a well thought-out answer.
DISCUSSION and HINTS
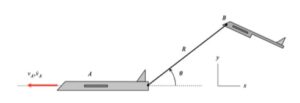
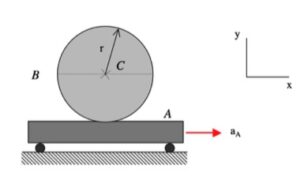
Block A moves to the right with a speed of vA, with this speed changing at a rate of aA. The disk rolls without slipping on the block in such a way that C has a known speed of vC, with this speed changing at a rate of aC.
It is recommended that for this problem, you use the following rigid body kinematics equations relating the motion of the center of the disk C and the point on the disk that is in contact with block A (let's call that point E):
vC = vE + ω x rC/E
aC = aE + α x rC/E - ω2rC/E
What do we know about the motion of point E? Point E has the same x-component of velocity and acceleration as does block A. The y-component of velocity of E is zero, but the y-component of acceleration of E is NOT zero. (Do you know why?)