Ask and answer questions here through Comments.
DISCUSSION and HINTS
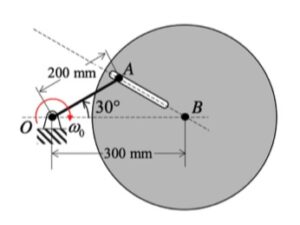
In this problem, we desire to relate the rotation rates of the slotted wheel and the disk. With the two rigid bodies connected by a pin-in-slot joint, we are not able to use the rigid body kinematics equations by themselves. Let’s discuss that below.

Before we do, however, can you think of a good application for such a mechanism design? Take a look at this short video.
Velocity analysis
Here, we can use the rigid body velocity equation to relate the motions of P and C:
vP = vC + ωdisk x rP/C
However, we cannot use a rigid body velocity equation to relate the motion of points O and P (the reason for this is that O and P are not connected by a rigid body). In its place, we can use the moving reference frame velocity equation with an observer attached to the slotted wheel:
vP = vO + (vP/O)rel + ω x rP/O
where ω is the angular velocity of the observer, and (vP/O)rel is the velocity of P as seen by our observer on the disk. Note that with the observer being attached to the slotted wheel, this observer sees motion of P only along the slot.
Combine these two equations to produce two scalar equations.
Acceleration analysis
We will use the same procedure for acceleration as we did for velocity – use a rigid body equation for the disk and a moving reference frame equation relating O and P:
aP = aC + αdisk x rP/C + ωdisk x (ωdisk x rP/C)
aP = aO + (aP/O)rel + α x rP/O + 2ω x (vP/O)rel + ω x (ω x rP/O)
where α is the angular acceleration of the observer, and (aP/O)rel is the acceleration of P as seen by our observer on the slotted wheel. Again, note that with the observer being attached to the slotted wheel, this observer sees motion of P only along the slot.
Combine these two equations to produce two scalar equations.