| Problem statement Solution video |
DISCUSSION THREAD

Ask your questions here. Or, answer questions of others here. Either way, you can learn.
DISCUSSION and HINTS
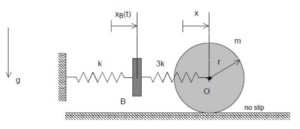
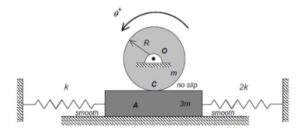
In this problem, the excitation does not come from a prescribed force, but, instead, it arises from a prescribed displacement on one body in the system. The support B here is given a prescribed motion of xB(t) = b sinωt, where ω is the frequency of excitation. Our goal is to solve for the particular solution of the response. Shown below is an animation of this forced response for a given value of excitation frequency? Can you tell from watching the motion of the system if the excitation frequency is less than or greater than the natural frequency of the system?

Recall the following four-step plan outline in the lecture book and discussed in lecture:
Step 1: FBDs
Draw a free body diagram (FBD) of the disk. You will need to temporarily define a coordinate representing the rotation of the disk. For example, you could use the angle θ as the angle of rotation for the disk, measured positive in the clockwise direction. Take care in getting the directions correct on the spring forces acting on the disk. Also, be sure to include the friction force acting on the disk by the cart B. Note that you do NOT need an FBD of B since you already know its motion.
Step 2: Kinetics (Newton/Euler)
Write down both Newton’s 2nd law and Euler’s equation for the disk. Note that with C being the no-slip point on the disk: ΣMC ≠ IC α. Why is that?
Step 3: Kinematics
Here you need to relate x_ddot to θ_ddot. How do you do this? Please note that C is an accelerating point on the disk.
Step 4: EOM
Combine your results from Step 2 and Step 3 to arrive at your EOM.
Once you have determined the EOM for the system, identify the natural frequency from the EOM. From the EOM we know that the particular solution of the EOM is given by: xP(t) = A*sin(ωt)+ B*sin(ωt). How do you find the forced response coefficients A and B? And, how do you determine the phase of this forced response?